Project
Posture Patch
Wearable for real-time posture feedback
Overview
Posture Patch uses an MPU6050 to track upper-body tilt and triggers a vibration motor when you slouch for more than 2 seconds — built for long study and desk sessions.
The goal is quiet, real-time correction without apps or screens: feel a buzz, sit up, keep working.
Why I built it
After hours at a laptop, I noticed my shoulders creeping forward and my lower back rounding — but I only caught it when I already felt sore.
I wanted something lightweight that could detect the pattern early and nudge me before pain set in.

How it works
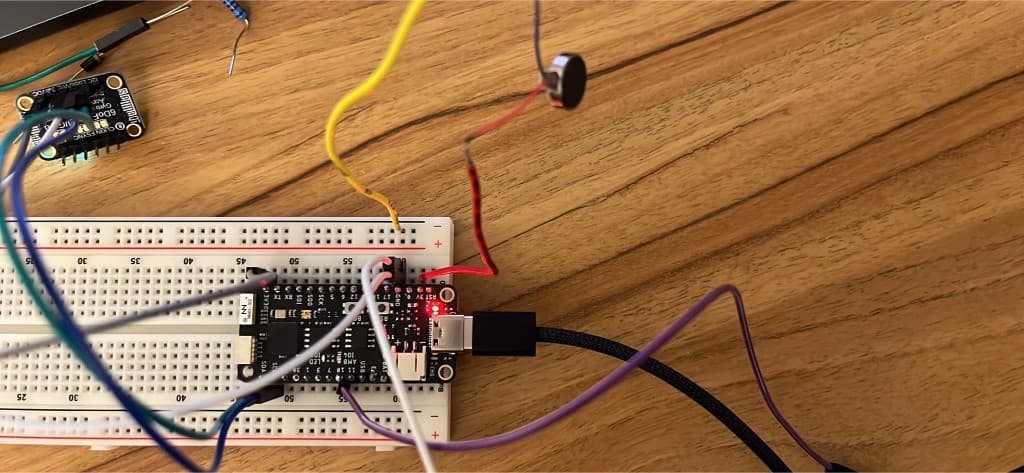
An MPU6050 fuses accelerometer and gyro data with a complementary filter, compared against a personal baseline you set at startup.
If tilt exceeds 5° while you’re settled (not moving much), a timer starts — hold bad posture for 2 seconds and the motor vibrates. Press the button anytime to recalibrate your baseline.
Firmware
Arduino sketch using the Adafruit MPU6050 library — gyro bias calibration on boot, complementary filtering, and motion gating so fidgeting doesn’t false-trigger the motor.
#include <Wire.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
Adafruit_MPU6050 mpu;
const int buttonPin = 10;
const int motorPin = 5;
float ax_f = 0, ay_f = 0, az_f = 0;
const float alpha = 0.15;
const float alphaCF = 0.95; // lowered from 0.98 to reduce drift
float fusedAngle = 0;
float baselineAngle = 0;
float gyroBiasY = 0;
unsigned long lastTime = 0;
unsigned long lastPress = 0;
const int debounceTime = 300;
const float threshold = 5.0;
const unsigned long holdTime = 2000;
unsigned long slouchStart = 0;
bool slouching = false;
bool alertOn = false;
// keep angle difference in [-180, 180]
float angleDiff(float a, float b) {
float diff = a - b;
while (diff > 180) diff -= 360;
while (diff < -180) diff += 360;
return diff;
}
void setup() {
Serial.begin(115200);
Wire.begin(8, 9);
pinMode(buttonPin, INPUT_PULLUP);
pinMode(motorPin, OUTPUT);
digitalWrite(motorPin, LOW);
if (!mpu.begin()) {
Serial.println("MPU6050 not found");
while (1);
}
mpu.setAccelerometerRange(MPU6050_RANGE_4_G);
mpu.setGyroRange(MPU6050_RANGE_250_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
Serial.println("Keep sensor still: calibrating gyro...");
float sumGy = 0;
const int samples = 300;
for (int i = 0; i < samples; i++) {
sensors_event_t a, g, t;
mpu.getEvent(&a, &g, &t);
sumGy += g.gyro.y;
delay(5);
}
gyroBiasY = sumGy / samples;
sensors_event_t a, g, t;
mpu.getEvent(&a, &g, &t);
ax_f = a.acceleration.x;
ay_f = a.acceleration.y;
az_f = a.acceleration.z;
fusedAngle = atan2(ax_f, sqrt(ay_f * ay_f + az_f * az_f)) * 180.0 / PI;
baselineAngle = fusedAngle;
lastTime = millis();
Serial.println("System ready");
}
void loop() {
sensors_event_t a, g, t;
mpu.getEvent(&a, &g, &t);
float ax = a.acceleration.x;
float ay = a.acceleration.y;
float az = a.acceleration.z;
ax_f = alpha * ax + (1 - alpha) * ax_f;
ay_f = alpha * ay + (1 - alpha) * ay_f;
az_f = alpha * az + (1 - alpha) * az_f;
float accelAngle = atan2(ax_f, sqrt(ay_f * ay_f + az_f * az_f)) * 180.0 / PI;
unsigned long now = millis();
float dt = (now - lastTime) / 1000.0;
lastTime = now;
if (dt <= 0 || dt > 0.5) dt = 0.02;
float gyroRate = (g.gyro.y - gyroBiasY) * 180.0 / PI;
fusedAngle = alphaCF * (fusedAngle + gyroRate * dt) + (1 - alphaCF) * accelAngle;
if (digitalRead(buttonPin) == LOW && now - lastPress > debounceTime) {
baselineAngle = fusedAngle;
Serial.println("Baseline recalibrated!");
lastPress = now;
}
float deviation = abs(angleDiff(fusedAngle, baselineAngle));
float gx = g.gyro.x;
float gy = g.gyro.y;
float gz = g.gyro.z;
float gyroMag = sqrt(gx * gx + gy * gy + gz * gz);
bool postureBad = deviation > threshold;
bool bodySettled = gyroMag < 1.00;
if (postureBad && bodySettled) {
if (!slouching) {
slouching = true;
slouchStart = now;
}
if (now - slouchStart >= holdTime) {
alertOn = true;
}
} else {
slouching = false;
alertOn = false;
slouchStart = now;
}
if (alertOn) {
digitalWrite(motorPin, HIGH);
} else {
digitalWrite(motorPin, LOW);
}
Serial.print("Accel angle: ");
Serial.print(accelAngle);
Serial.print(" Fused angle: ");
Serial.print(fusedAngle);
Serial.print(" Deviation: ");
Serial.print(deviation);
Serial.print(" GyroMag: ");
Serial.print(gyroMag);
Serial.print(" Alert: ");
Serial.println(alertOn ? "ON" : "OFF");
delay(1000);
}
Next steps
Exploring graphene 2D tattoos for sensing posture — thinner, flexible sensors that could sit closer to the skin than a rigid IMU board.